


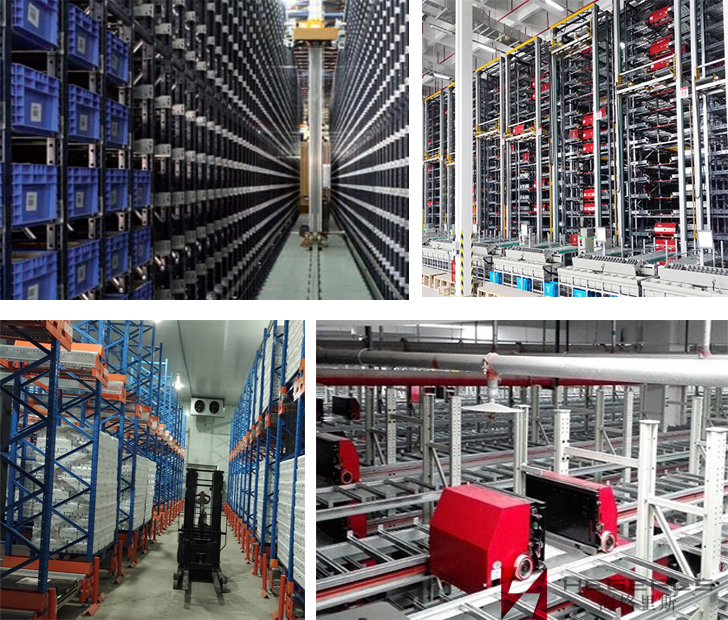
Vitet e fundit, me popullaritetin e vazhdueshëm të internetit, tregtia elektronike është zhvilluar me shpejtësi.Mallrat e porosive të klientëve tregojnë karakteristikat e shumë varieteteve, pak tufave dhe periudhës së shkurtër të dorëzimit, gjë që bën që dendësia e ruajtjes së rafteve në qendrën e shpërndarjes logjistike të furnizuesit të përmirësohet vazhdimisht.Frekuenca e materialeve që hyjnë dhe dalin nga magazina është në rritje.Numri i grumbullimit të pjesëve të vogla po rritet dita ditës.Gjithnjë e më shumë qendra të shpërndarjes logjistike përdorin sistemin e zgjedhjes së mallrave të bazuara në automjete të transportit.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
Pirunët teleskopik shtrëngues përdoren gjerësisht në pajisjet automatike të magazinimit si makinat e anijes me shumë shtresa të depove stereo, kazanët e tipit raft AGV, RGV dhe mini ngarkesë.Pesha maksimale e kutisë së materialit të mbajtur nga HEGERLS mund të arrijë 50 kg.Gjerësia e shtrëngimit të krahut të pirunit mund të rregullohet në mënyrë arbitrare brenda intervalit 200~600 mm.Udhëtimi maksimal i marrjes është 840 mm.Shpejtësia maksimale e funksionimit të pirunit teleskopik është 1,5 m/s dhe përshpejtimi është 1,2 m/s ². Zhurma e funksionimit kontrollohet brenda 75 dB, gjë që mund të plotësojë kërkesat e shumicës së rafteve të zgjatjes së vetme dhe të dyfishtë.HEGERLS mund të personalizojë gjithashtu magazinën stereoskopike të makinës me shumë shtresa të kutisë së pirunit teleskopik mbërthyes sipas kërkesave specifike të klientëve, si p.sh. gjerësia e kapjes, hapja e marrjes dhe parametra të tjerë.
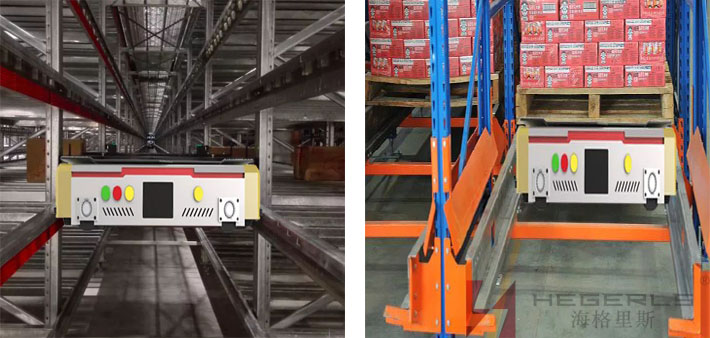
Pjesët në kutinë e pirunit teleskopik me kapje Hiygris HEGERLS, magazinën stereo të makinës me shumë shtresa, pirunja teleskopike është një mekanizëm teleskopik që përdoret në magazinë stereo dhe në sistemin e magazinimit automatik logjistik për ruajtjen ose transferimin e materialeve.Ka funksion fleksibël të zgjerimit automatik me dy drejtime dhe funksion të saktë të kufirit!Mund të montohet drejtpërdrejt në staker, ose të montohet në një mekanizëm fiks ngritës, ose të montohet në një platformë të lëvizshme ngritëse.Staveri kalon nëpër rrugë midis rafteve për të hyrë ose transferuar automatikisht artikujt!Mund të lidhet me sistemin e linjës së prodhimit dhe sistemin e menaxhimit të ndërmarrjes.Përdor kompjuterin dhe teknologjinë e barkodit (enkoder) për të realizuar menaxhimin dhe funksionimin inteligjent të informacionit!

Rreth pirunit teleskopik shtrëngues HEGERLS
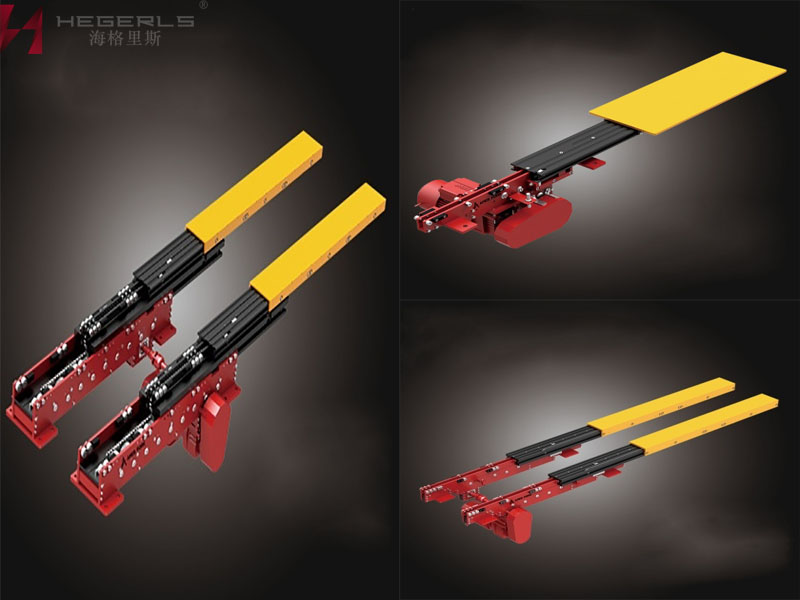
Piruni teleskopik kapës HEGERLS është një lloj piruni unik në serinë e pirunëve teleskopik të stivuesve, përkatësisht, një pirun automatik teleskopik me dy drejtime, i njohur gjithashtu si pirun mbajtës ose pirun mbajtës, pirun pirun ose pirun. .Është një pirun i përdorur posaçërisht për transferimin e kazanëve të vegjël.Mund të montohet drejtpërdrejt në një AGV grumbullimi shumëkatëshe ose platforma të tjera pune, me zgjerimin e krahut të pirunit dhe tufën e levës (grep), Përfundoni veprimin e hyrjes ose transferimit!
Piruni kapës HEGERLS është bërë kryesisht nga aliazh alumini, me përmasa të vogla, peshë të lehtë, shpejtësi të shpejtë drejtimi dhe zgjerim të qetë.Në të njëjtën kohë, ai gjithashtu miraton parimin e sinkronizimit me shumë motorë, duke kuptuar se i njëjti mekanizëm pirun teleskopik mund të përdoret për të transferuar ose aksesuar kuti të specifikimeve të ndryshme.Ai jo vetëm që përmirëson efektivisht efikasitetin e ruajtjes, por gjithashtu përmirëson në masë të madhe shkallën e përdorimit të hapësirës së ruajtjes, veçanërisht për magazinat inteligjente intensive të larta!
Kapëse HEGERLS në strukturën e pirunit teleskopik
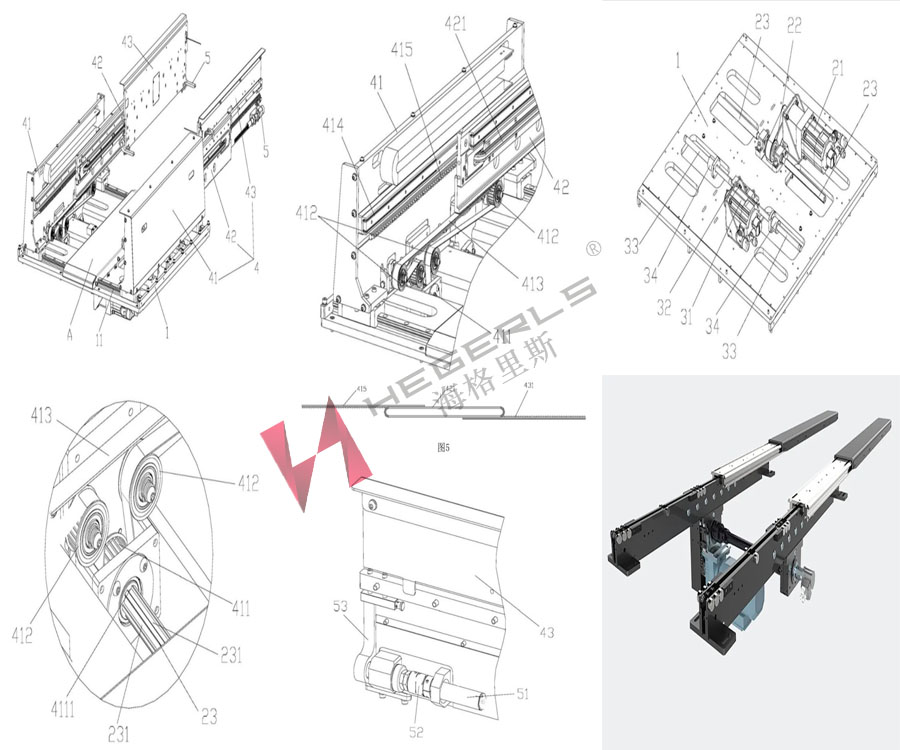
Struktura e pirunit të kapjes HEGERLS mund të ndahet në vendndodhjen e ruajtjes së thellë dhe vendndodhjen e cekët të magazinimit.Vendi i ruajtjes së thellë është një vend magazinimi me dy kuti materialesh dhe një vend i cekët i ruajtjes është një vend magazinimi me një kuti materiale.Kjo do të thotë, një vend magazinimi i thellë mund të shtrëngojë dy kuti materiale në të njëjtën kohë, ndërsa një vend i cekët i ruajtjes mund të shtrëngojë vetëm një kuti materiale në të njëjtën kohë.Dallimi midis pirunit kapës HEGERLS dhe pirunit të zakonshëm teleskopik të dyfishtë është se piruni tërheqës i gishtit është ende i përbërë nga tre trupa të pirunit, përkatësisht, trupi i brendshëm i pirunit, trupi i mesit dhe trupi i pirunit të jashtëm, përveç se trupi i pirunit të përparmë ka edhe një shufër tërheqëse (grep), e cila përputhet me hekurudhën udhëzuese (shinë rrëshqitëse), shirit rrotullues, rrotë sinkron, rrip sinkron, shufër rrjedhëse, shufër ndërruesi (grep), bosht lidhës, shirit rrotash, motor lëvizës (servo) , motori i shufrës së ndërrimit Instrumenti i zbulimit dhe përbërësit e tjerë formojnë një mekanizëm të plotë teleskopik, i cili bashkëpunon me krahun teleskopik të pirunit dhe tufën e levës (grepin) për të përfunduar veprimin e hyrjes ose transferimit!
Parimi i punës së kapëses HEGERLS në pirun teleskopik
Krahu i pirunit të pirunit kapës HEGERLS është në këmbë dhe lidhet anash me shina udhëzuese.Nëpërmjet kontrollit, hekurudha udhëzuese mund të rrëshqasë përpara dhe mbrapa për të rregulluar distancën midis dy krahëve të pirunit të pirunit, në mënyrë që të arrihet përdorimi i zakonshëm i një piruni për kutitë e materialeve me shumë specifikime!Kur merr materialet, piruni shtrihet në pozicionin e ruajtjes së materialit, grepa mbajtëse (leva) ulet automatikisht dhe bllokon faqen fundore të kartonit ose kutisë plastike, dhe më pas piruni tërhiqet, duke e tërhequr kartonin ose kutinë plastike në mes të piruni, dhe më pas lëviz mbrapsht sipas kërkesave të shkallës, grepa (levë) tërhiqet prapa dhe piruni tërhiqet përsëri për të përfunduar detyrën e marrjes ose transferimit!Megjithëse parimi i pirunit të kapjes është i njëjtë me atë të pirunit të zakonshëm teleskopik, pjesët e transmisionit, shufrat lidhës dhe përbërësit e tjerë të pirunit të gishtit janë shumë të ndryshme.Përdoret për të përshkruar se rrota e zinxhirit, zinxhiri, ingranazhi, rafti, etj. janë zëvendësuar të gjitha me rrota sinkrone, rripa sinkron, etj., ndërsa krahu rrëshqitës përdor shina udhëzuese dhe materialet e trupit të pirunit zëvendësohen të gjitha nga fletë metalike. ose materiale aliazh alumini, kështu që pesha e pirunit kapës është vetëm rreth 80 kg.
Përveç kësaj, duhet të theksohet se gjatë projektimit të pirunit teleskopik të tipit gripper, duhet të kombinohen madhësia e rafteve të dendura të ruajtjes, pozicioni vertikal i rafteve me kuti, niveli i gjurmës dhe madhësia e kutive për të përcaktuar parametrat e përgjithshëm të pirunëve zgjatues (lëvizja e pirunit zgjatues, hapësira e kutisë, gjerësia e pirunit, gjerësia e brendshme e pirunit, lartësia e pirunit, etj.), në mënyrë që të plotësohen nevojat e kontejnerëve në rafte.Piruni shtrëngues mund të transferojë ose aksesojë vetëm produktet e paketuara në kuti kartoni ose kuti plastike në mënyrë efektive dhe nuk mund të transferojë materiale të parregullta.Për më tepër, vëllimi dhe pesha e kutisë së materialit të transferuar nuk duhet të jetë shumë e madhe, dhe pesha e ngarkesës nuk duhet të kalojë 100 kg!Lartësia e pirunit shtrëngues është projektuar përgjithësisht sipas lartësisë së koshit!
Rreth klipit HEGERLS në Shuttle
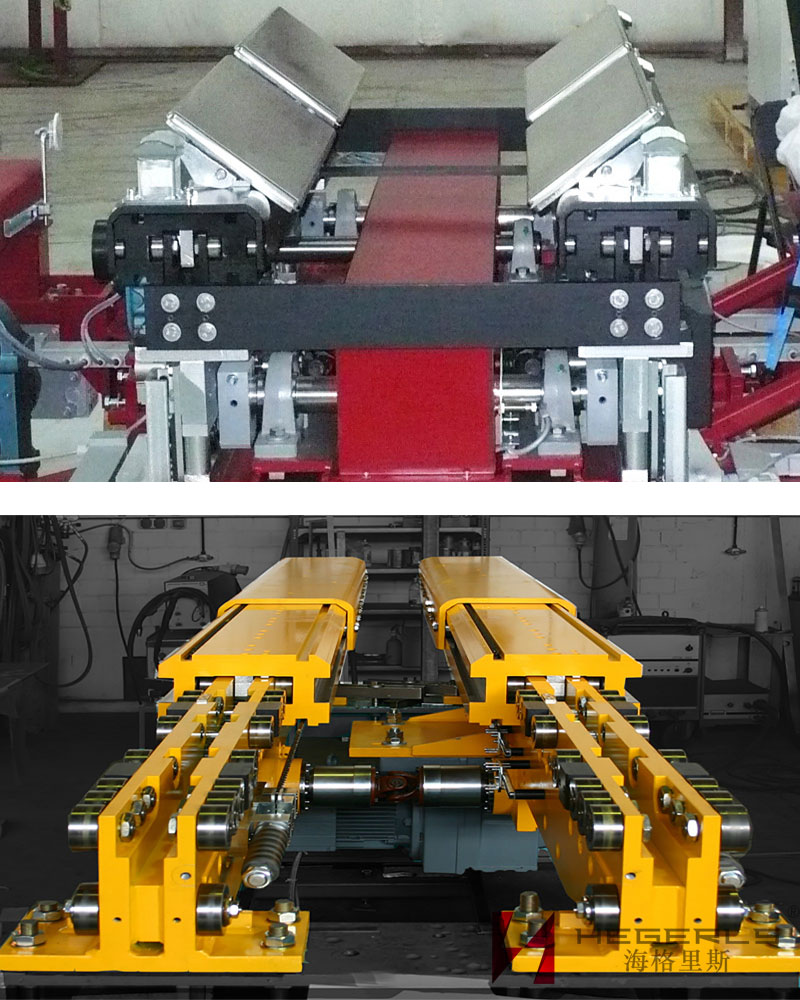
Struktura e kapëses HEGERLS në anije përbëhet nga korniza e anijes, shasia e anijes, mekanizmi i udhëtimit, mekanizmi dytësor i zgjatjes së pirunit, kolektori, pllaka mbajtëse dhe platforma mbajtëse.Struktura është si më poshtë:
Çdo kornizë anijesh është zakonisht një zgavër e mbyllur e përbërë nga kllapat e trupit kryesor në të dy anët, guaska dhe kllapa e brendshme e qendrës, dhe është e rregulluar përkatësisht në të dy skajet e shasisë së anijes;Predha është e pajisur me një mbulesë të sipërme e cila mund të hapet dhe mbyllet përmes një menteshë dere rrotulluese;Një raft me tela paneli është rregulluar mbi mbajtësen e shpërndarësit;Mekanizmi i lëvizjes përbëhet nga një rrotë lëvizëse, një rrotë pasive, një motor DC pa furça, një reduktues dhe një bosht lidhës;Të dy anët e kornizës së anijes në njërin skaj të shasisë së anijes janë të pajisura me rrota lëvizëse të lidhura me boshte lidhëse, dhe të dyja anët e kornizës së anijes në skajin tjetër të shasisë së anijes janë të pajisura me rrota pasive të lidhura me boshte lidhëse;Motori pa furçë DC bashkëpunon me reduktuesin për të drejtuar timonin lëvizës dhe për të drejtuar rrotën pasive;Boshti lidhës është i pajisur me një kodues magnetik, përmes të cilit merren pozicionet e fillimit dhe ndalimit të anijes në rrugën e drejtë;Një mekanizëm dytësor zgjatimi i pirunit është i rregulluar në mënyrë simetrike në anën e brendshme të kornizës së makinës së anijes;Shasia e anijes midis mekanizmave të zgjatjes dytësore të pirunit është e pajisur me një platformë mbajtëse për vendosjen e koshit të ngarkesave;Zgavra e mbyllur e kornizës së makinës së anijes është e pajisur përkatësisht me një pllakë mbajtëse, mbi të cilën janë vendosur në mënyrë të njëpasnjëshme një pllakë lëvizëse, një pllakë kryesore e kontrollit të mekanizmit të lëvizjes dhe një pllakë kryesore e kontrollit të mekanizmit të zgjatjes së pirunit;Pllaka lëvizëse drejton mekanizmin e udhëtimit për të drejtuar anijen për të ecur në rrugën e drejtë.Tabela kryesore e kontrollit të mekanizmit të udhëtimit kontrollon parametrat e drejtimit dhe pozicionet e ndalimit të nisjes së anijes, dhe bordi kryesor i kontrollit të mekanizmit të zgjatjes së pirunit kontrollon mekanizmin dytësor të zgjatjes së pirunit për të kapur dhe vendosur shportën në raft;Një pajisje grumbulluese vendoset midis makinës së anijes dhe trasesë së drejtë, e cila lidhet me telin e elektrizuar të vendosur brenda trasesë së drejtë dhe përdoret për të furnizuar me energji elektrike makinën e anijes.Karakteristika strukturore e kapëses në makinën inteligjente të anijes për ruajtje qëndron gjithashtu në atë që brazdat janë vendosur në pozicionet ku rrota lëvizëse dhe ajo pasive përkatësisht kontaktojnë boshtin lidhës, dhe një unazë mbajtëse elastike është vendosur në brazdë për të formuar boshtin. pozicionimi i timonit drejtues dhe i rrotës pasive.Rrotat udhëzuese të dyfishta vendosen përkatësisht në anën e shasisë së anijes nën timonin lëvizës dhe rrotën pasive, dhe midis trasesë së drejtë dhe shasisë së anijes.Rrotat udhëzuese të dyfishta formojnë kufijtë majtas dhe djathtas kur rrota lëvizëse dhe ajo pasive janë duke ecur në rrugën e drejtë.Mekanizmi dytësor i zgjatimit të pirunit përfshin: pllakën shtytëse të zgjatimit të pirunit të nivelit të parë, pllakën e zgjatjes së pirunit të nivelit të dytë, mekanizmin sinkron të rrotullës së nivelit të dytë, mekanizmin e shtytjes së zgjatimit të pirunit të nivelit të dytë, motorin e shtytjes së zgjatimit të pirunit, një reduktues tjetër dhe boshtin e lëvizjes ;Ana e jashtme e mbajtëses së qendrës së kornizës së makinës së anijes është e pajisur me një pllakë shtytëse të zgjatjes së pirunit të fazës së parë;Në mes të pllakës shtytëse të pirunit të fazës së parë vendoset një gropë në formë U-je dhe disa rrota në formë U-je janë vendosur në intervale të barabarta në gropën në formë U-je;Një pllakë e dytë e pirunit është rregulluar jashtë gropës në formë U;Pllaka dytësore e pirunit është e lidhur me disa rrotulla në formë U-je përmes bulonave dhe dadove;Skajet e sipërme të pllakës zgjatuese të pirunit të fazës së dytë janë të pajisura përkatësisht me një pirun ndërrimi, një motor reduktues planetar DC dhe një sensor fotoelektrik nga jashtë në brendësi;Sensori fotoelektrik përdoret për të marrë sinjalin e pozicionit të pirunit dhe për ta dërguar atë në bordin kryesor të kontrollit të mekanizmit të zgjatjes së pirunit, i cili kontrollon motorin reduktues planetar DC për të shtyrë pirunin të lëvizë horizontalisht ose vertikalisht;Një mekanizëm sekondar sinkron i rrotullës është rregulluar përkatësisht në pllakën shtytëse të pirunit primar dhe direkt nën dhe mbi gropën në formë U;Mekanizmi sekondar i rrotullës sinkron është i lidhur me pllakën e presionit të rripit sinkron në pllakën e zgjatjes dytësore të pirunit;Motori i shtytësit të zgjatimit të pirunit dhe një zvogëlues tjetër lëvizin mekanizmin e shtytësit dytësor të zgjatimit të pirunit për të lëvizur dhe mekanizmin dytësor të shtytësit të zgjatimit të pirunit në anën tjetër për të lëvizur nëpër boshtin e makinës, në mënyrë që pllaka shtytëse kryesore e zgjatimit të pirunit të lëvizë dhe të lëvizë dytësorin mekanizmi sinkron i rrotullës për të lëvizur, duke e shtyrë kështu pllakën e zgjatjes dytësore të pirunit të lëvizë.Mekanizmi i transmetimit të zgjatjes së pirunit me dy faza përbëhet nga një kodues magnetik, një rrotull i rripit sinkron I, një rrip sinkron I, një pajisje rrote tensionuese dhe një raft;Një rrotull e rripit të kohës 1 dhe një rrip kohor 1 janë vendosur poshtë pllakës shtytëse të pirunit të fazës së parë;Njëra anë e rrotullës së rripit sinkron I është e lidhur me boshtin e transmisionit, dhe ana tjetër është e lidhur me boshtin e daljes së reduktuesit tjetër përmes rrugës kyçe.Pajisjet e rrotave tensionuese vendosen përkatësisht në të dy anët e reduktorit tjetër për fiksim ndihmës të rrotullës së rripit sinkron I dhe rripit sinkron I;Një raft është rregulluar midis pllakës shtytëse të pirunit të fazës së parë dhe rripit sinkron;Motori i shtytësit të zgjatjes së pirunit dhe një reduktues tjetër lëvizin rrotullën e rripit sinkron I dhe rripin sinkron I dhe drejtojnë rrotullën e rripit sinkron II dhe rripin sinkron II në anën tjetër për të rrotulluar nëpër boshtin e transmisionit.Në të njëjtën kohë, raftet në të dyja anët drejtojnë pllakën shtytëse përkatëse të zgjatjes së pirunit për të arritur shtrirjen kryesore të pirunit.Kur mekanizmi sekondar i rrotullës së rripit sinkron lëviz në mënyrë sinkronike dhe shtyn të lëvizë pllakën e zgjatjes dytësore të pirunit, rrotulla në formë U rrotullohet në gropën në formë U.Pajisja e rrotës tensionuese përfshin: bulonën, mbajtësen e rregullimit, dado të dyfishtë dhe rrotën shtrënguese;Një rrotë tensionuese është rregulluar poshtë rripit sinkron I dhe në të dy anët e reduktuesit tjetër dhe është fiksuar në mbajtësin e trupit kryesor përmes një dadoje të dyfishtë;Një mbajtës rregullues është rregulluar nën dadën e dyfishtë përmes bulonës dhe pozicioni i kllapës rregulluese rregullohet nga bulon, në mënyrë që kllapa rregulluese të shtyjë dadën e dyfishtë të lëvizë lart e poshtë, në mënyrë që rripi sinkron të mund të mbajë gjendja e tensionit nën veprimin e rrotës tensionuese.
Si do të përfitojë ndërmarrja HEGERLS me autobus të transportit?
Së pari, mekanizmi i udhëtimit, mekanizmi i zgjatimit të pirunit dhe korniza, linja e kontaktit rrëshqitëse dhe pajisja e grumbullimit të energjisë së automobilit inteligjent HEGERLS me kapëse në ruajtje janë rregulluar në mënyrë të arsyeshme, gjë që shfrytëzon plotësisht hapësirën e makinës së anijes dhe mund të përshtatet me magazinimi dhe marrja automatike e mallrave të specifikimeve dhe vendndodhjeve të ndryshme në magazinë tre-dimensionale, duke zgjeruar mbulimin e aplikimit të makinës së anijes dhe për të përfunduar shpejt dhe në mënyrë efektive një sërë veprimesh të vazhdueshme të autobusit, si ecja, zgjatja e pirunit, marrja. ngritjen dhe vendosjen e mallrave, realizon magazinimin e shpejtë dhe të saktë të mallrave, duke përmirësuar kështu në masë të madhe efikasitetin e funksionimit dhe nivelin e teknologjisë së automatizimit të magazinës së automatizuar dhe duke ulur kostot e investimit të ndërmarrjeve.Në të njëjtën kohë, është i thjeshtë dhe i lehtë në strukturë, i lartë në besueshmëri dhe i lehtë për t'u mirëmbajtur.Ai mund të zëvendësojë stakerin tradicional të rrugëve, duke realizuar fleksibilitetin e sistemit dhe përputhet me trendin e zhvillimit të logjistikës së tregtisë elektronike dhe automatizimit të magazinimit.
Së dyti, në mekanizmin e udhëtimit të makinës inteligjente të anijes HEGERLS, boshtet lidhëse të rrotave lëvizëse dhe rrotave pasive janë të pajisura me brazda, dhe pjesët lidhëse të kushinetave lidhen me një lloj të ri unaze mbajtëse elastike, duke realizuar efektin e pozicionimit boshtor të lidhjes. boshte;Duke përdorur unazën elastike mbajtëse për të arritur efektin e pozicionimit boshtor, efikasiteti i prodhimit mund të rritet dhe kostoja mund të kursehet.
Së treti: Makina inteligjente e anijes Higelis HEGERLS për mbajtjen e magazinimit kupton se rrota lëvizëse dhe rrota pasive lëvizin gjithmonë në rrugën e drejtë pa devijuar nga binarët përmes strukturës së dyfishtë të rrotës udhëzuese.Kjo strukturë pozicionimi është më e qëndrueshme dhe më e besueshme.
Së katërti, struktura dytësore e zgjatjes së pirunit e adoptuar nga makina inteligjente e anijes HEGERLS mund ta bëjë distancën e zgjatjes së pirunit më larg dhe të marrë më shumë kosha në pozicione të ndryshme;Në të njëjtën kohë, parimi i mekanizmit të zgjatjes së pirunit dytësor është i thjeshtë, dhe kostoja e projektimit dhe prodhimit është e ulët;Pjesa e transmisionit adopton modalitetin e një motori të vetëm + reduktues + bosht transmisioni për të bërë mekanizmin dytësor të zgjatjes së pirunit të arrijë qëllimin e zgjerimit dhe tkurrjes sinkron, i cili kursen më shumë kosto, zvogëlon në mënyrë efektive hapësirën e kërkuar të paraqitjes dhe zvogëlon peshën e makinës së anijes .
Së pesti, makina inteligjente e anijes Higelis HEGERLS adopton një lloj të ri pajisjeje të rrotave shtrënguese, e cila mund të mbajë shpejt rripin sinkron të tensionuar dhe të realizojë punën normale të makinës së transportit.Për më tepër, kjo pajisje e rrotës shtrënguese është e thjeshtë për t'u bërë, e përshtatshme për t'u instaluar dhe mund të rregullohet shpejt, gjë që kursen koston, kursen hapësirën dhe përmirëson efikasitetin e punës.
Koha e postimit: Dhjetor-19-2022